Áp dụng công nghệ định vị, cảm biến tự động tìm kiếm trên phạm vi rộng đang là nhu cầu bức thiết nhằm giảm nguồn lực và nâng cao hiệu quả trong công tác cứu nạn, cứu hộ. Vì vậy, việc sử dụng phương tiện bay không người lái (UVA) có khả năng tìm kiếm bao quát rộng, định vị tốt nhằm rút ngắn thời gian tìm kiếm và giảm thiểu sự tham gia của con người vào công tác cứu nạn, cứu hộ là một trong những vấn đề đặt ra hiện nay.
Thời gian vừa qua, trên địa bàn cả nước đã xảy ra một số vụ tai nạn, mất tích dẫn tới việc lực lượng Cảnh sát PCCC và CNCH phải tổ chức các hoạt động tìm kiếm, cứu nạn, cứu hộ trong thời gian dài như: Vào ngày 03/6/2016, một du khách người Anh mất tích ở khu du lịch Sa Pa – Lào Cai; ngày 14/6/2016, máy bay quân sự Su-30MK2 mang số hiệu 8585 của Trung đoàn 923, Sư đoàn 371, thuộc Quân chủng Phòng không - Không quân làm nhiệm vụ bay huấn luyện bị mất liên lạc và mất tích cùng với 02 phi công; ngày 14/6/2016, máy bay tuần thám CASA 212 số hiệu 8983 mất liên lạc trên vùng biển Bạch Long Vỹ khi làm nhiệm vụ tìm kiếm phi công trên chuyến bay Su-30MK2 và 09 quân nhân mất tích đã đặt ra vấn đề phải dùng phương tiện bay không người lái (UVA) phục vụ công tác tìm kiếm cứu nạn, cứu hộ từng bước nâng cao hiệu quả công tác này.
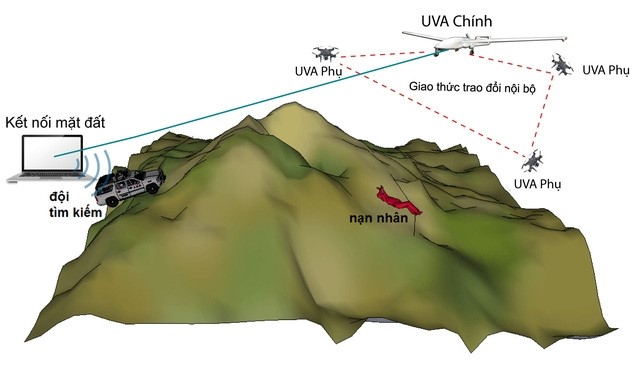
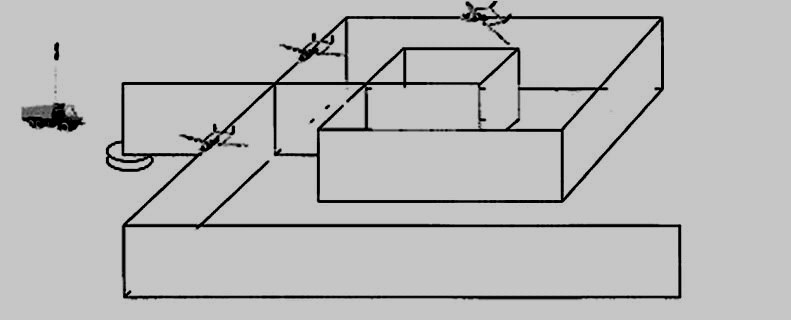
Hình 1. Kịch bản mô phỏng hoạt động tìm kiếm với mạng lưới các UVA trong công tác cứu nạn, cứu hộ
Một số những tính năng chính của UVA
Các tính năng chính của thiết bị UVA trong hoạt động SAR là:
- Hỗ trợ triển khai các hoạt động tìm kiếm, cứu hộ, cứu nạn một cách nhanh nhất ở những nơi có địa hình rộng lớn, phức tạp trong mọi tình huống khẩn cấp để nhanh chóng xác định trọng tâm, ranh giới, quy mô, hướng, tốc độ tai nạn (thảm họa) và đưa ra phương án khắc phục kịp thời;
- Phát hiện nguồn lửa và tọa độ của chúng, tính toán hướng lan truyền đám cháy, xác định nguyên nhân ban đầu gây cháy; giám sát, phát hiện và cảnh báo sớm nguy cơ cháy rừng nhằm giảm thiểu sự đe dọa tới các khu vực dân cư, cũng như các cơ sở công nghiệp, năng lượng lân cận;
- Tiến hành trinh sát, phát hiện bức xạ nhiệt, phóng xạ, đo nồng độ hóa chất tại khu vực xảy ra sự cố hoá chất trong một phạm vi nhất định, đưa ra các giải pháp tiếp cận xử lý có hiệu quả cho lực lượng làm nhiệm vụ;
- Đưa ra các cảnh báo về kỹ thuật đối với các hiện tượng của thời tiết như lũ lụt, động đất, sóng thần và thiên tai khác; giám sát, thăm dò và cảnh báo sớm các khu vực thường xảy ra hiện tượng sạt lở đất, đá;
- Theo dõi, giám sát tình trạng của các đường ống vận chuyển, đường ống dẫn dầu, khí; đường dây điện cao áp và các cơ sở khác;
- Giám sát các vùng nước và đường bờ biển, xác định ranh giới của sự cố tràn dầu và các sản phẩm dầu mỏ trên mặt nước và hướng di chuyển của vết dầu loang từ đó đưa ra các giải pháp khắc phục có hiệu quả;
- Xác định tọa độ chính xác của các khu vực khẩn cấp và các cơ sở bị ảnh hưởng; trinh sát và định hướng tuyến đường di chuyển thuận lợi cho lực lượng và phương tiện cứu nạn, cứu hộ tới hiện trường. Tiến hành tìm kiếm các nhóm nạn nhân trong các trường hợp khẩn cấp;
- Tiến hành hoạt động tìm kiếm, cứu hộ tại các sự cố giếng dầu, khí đốt ngoài khơi, tàu thuyền gặp tai nạn, máy bay rơi; xác định chính xác tọa độ, vị trí xảy ra sự cố và chuyển mọi thông tin liên quan về trung tâm ứng phó khẩn cấp;
- Vận chuyển hàng hóa và phương tiện cỡ nhỏ, thuốc men đến các khu vực nguy hiểm trong các tình huống khẩn cấp hoặc khu vực có hành vi khủng bố;
- Hỗ trợ các hoạt động tìm kiếm, cứu hộ, cứu nạn khác.
Hệ thống UVA bao gồm: Thân máy bay; đầu thu, phát GPS; cảm biến tốc độ gió; cảm biến độ cao; cảm biến áp xuất; cảm biến cân bằng và bộ thu phát tín hiệu; pin cung cấp nguồn điện cho quá trình hoạt động thiết bị.
Phân loại UVA gồm có: UVA dạng lên thẳng, UVA dạng cánh bằng, UVA dạng hỗn hợp. Dạng lên thẳng gồm hai loại: Một động cơ và nhiều động cơ, tuy nhiên loại nhiều động cơ thường được sử dụng rộng rãi.
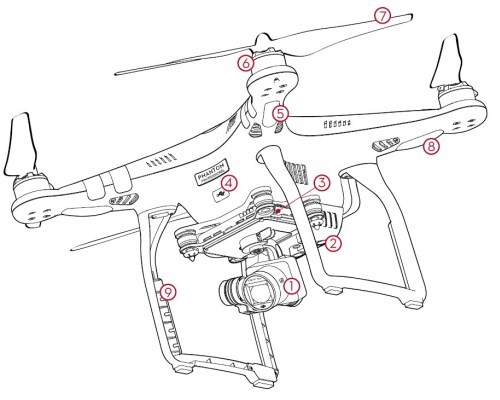
Hình 2. Mô hình thiết bị bay không người lái cơ bản (UVA)
1. Máy ảnh và máy ảnh; 2. Hệ thống định vị tầm nhìn; 3. Khe cắm thẻ nhớ; 4. Cổng Micro-USB; 5. Cảm biến lên thẳng; 6. Đèn LED phía trước; 7. Cánh quạt; 8. Cảm biến báo trạng thái bay; 9. Ăng ten
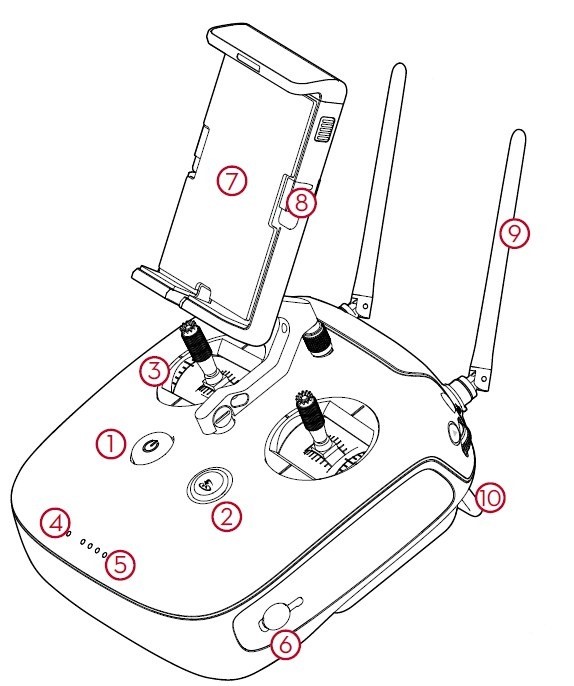
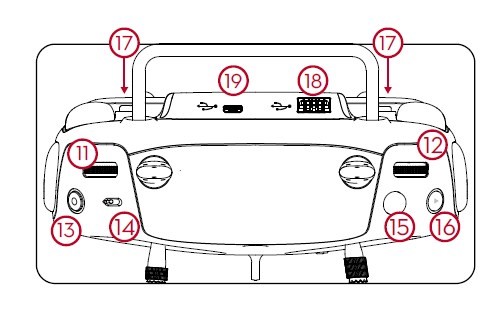
Hình 3. Bộ điều khiển thiết bị bay không người lái cơ bản
1. Nút nguồn; 2. Nút gọi quay về; 3. Núm điều khiển; 4. Trạng thái đèn LED; 5. Mức sạc LED6. Cổng sạc; 7. Giá đỡ máy tính bảng; 8. Giá đỡ điện thoại di động; 9. Ăng ten; 10. Tay cầm; 11. Quay số kiểm soát ; 12. Chống rung; 13. Quay số cài đặt camera; 14. Nút quay video; 15. Công tắc chế độ bay; 16. Nút ảnh; 17. Nút phát; 17. Các nút C1/C2 (cấu hình); 18. Cổng USB; 19. Cổng micro-USB
Hình ảnh bộ thiết bị phương tiện bay không người lái cơ bản
Tùy thuộc vào từng nhiệm vụ cụ thể, UVA có thể lắp đặt thêm các thiết bị kỹ thuật chuyên dùng khác nhằm phù hợp với mục đích tìm kiếm như: Máy phân tích khí, thiết bị trinh sát hóa học hoặc phóng xạ, camera cảm biến nhiệt, camera hồng ngoại, máy quay video, v.v. Khi tìm kiếm (sử dụng camera hồng ngoại) trên UVA dạng máy bay thì nên thực hiện các chuyến bay tìm kiếm ở độ cao không quá 500 - 600 m, trên UVA lên thẳng thì ở độ cao 200 - 300 m. Độ cao chuyến bay có thể được chỉ định tùy thuộc vào đặc điểm của khu vực tìm kiếm, điều kiện khí hậu, trình độ của người điều khiển, thời điểm tìm kiếm và phạm vi phát hiện vật thể trong phạm vi quan sát.
Bảng phạm vi phát hiện trực quan trung bình của UVA đối với một số đối tượng trong khu vực tìm kiếm theo điều kiện thời tiết từng mùa.
|
Đối tượng quan sát
|
Thời điểm
|
Độ cao, m
|
Phạm vi phát hiện, km
|
|
Một người hoặc nhóm người
|
Mùa đông
|
200
|
1,6 - 1,8
|
|
Mùa hè
|
200
|
1,0 - 1,4
|
|
Máy bay, trực thăng gặp nạn
|
Mùa đông và mùa hè
|
200
|
2 - 4
|
|
Ngọn lửa
|
Ban đêm
|
300
|
8 - 12
|
|
Đèn pin, đèn tín hiệu
|
Ban đêm
|
300
|
2 - 4
|
Một số lưu ý khi tiến hành tìm kiếm ở các địa hình khác nhau
Khi tiến hành công tác tìm kiếm tại khu vực rừng cây rậm rạp: Cần thực hiện chuyến bay tìm kiếm ở độ cao lớn nhất có thể nhằm cung cấp hình ảnh bao quát toàn khu vực tiến hành nhiệm vụ tìm kiếm để phát hiện các đám cháy hoặc khói sinh ra từ đám cháy hoặc nạn nhân trong sự cố, tai nạn. Khoảng cách giữa các tuyến kiểm tra không vượt quá hai lần độ cao trần bay của thiết bị.
Khi tiến hành công tác tìm kiếm tại khu vực đồi núi: Cần tiến hành kiểm tra chi tiết các hẻm núi, thung lũng và sông, suối nhỏ quanh khu vực. Kiểm tra đỉnh núi phải được thực hiện từ mọi phía. Để quan sát cẩn thận địa hình gồ ghề, nên tiến hành trinh sát bằng cách lặp đi lặp lại địa điểm từ các hướng khác nhau.
Khi thực hiện công tác tìm kiếm vào ban đêm: Khi sử dụng camera hồng ngoại có độ phân giải cao thực hiện nhiệm vụ tìm kiếm các đối tượng tương phản nhiệt vào ban đêm, thiết bị chính cần lắp đặt là thiết bị cảm biến nhiệt độ tương phản. Khó khăn nhất khi thực hiện tìm kiếm vào ban đêm là việc quan sát thời tiết và những thay đổi của nó. Việc kiểm soát chuyến bay của UVA vào ban đêm được thực hiện về cơ bản theo các quy tắc giống như ban ngày. Tuy nhiên, điều kiện ban đêm làm người điều khiển gặp khó khăn trong việc duy trì bay của UVA. Do vậy, trong điều kiện ban đêm, các chuyến bay UVA ở độ cao thấp có hiệu quả cao nhất.
Bảng 1. Phạm vi quan sát đối tượng tìm kiếm của UVA từ độ cao thấp
|
Khu vực
|
Phạm vi tìm kiếm (km) từ độ cao của UVA (m)
|
|
100
|
200
|
300
|
400
|
500
|
600
|
|
Khu vực dân cư lớn
|
4
|
8
|
12
|
16
|
18
|
20
|
|
Khu vực dân cư nhỏ
|
2
|
4
|
5
|
8
|
9
|
10
|
|
Sông lớn, hồ
|
2
|
4
|
5
|
8
|
9
|
10
|
|
Sông nhỏ
|
1
|
2
|
3
|
4
|
5
|
5
|
|
Đường cao tốc, đường sắt
|
1
|
2
|
5
|
7
|
9
|
10
|
|
Rừng
|
2
|
4
|
5
|
7
|
8
|
10
|
Bảng 2. Thời gian quan sát các điểm mốc khi bay ở độ cao thấp
|
Tốc độ bay (km/h)
|
Thời gian quan sát (s) từ độ cao của UVA (m)
|
|
100
|
200
|
300
|
400
|
500
|
600
|
|
200
|
6
|
13
|
19
|
25
|
31
|
38
|
|
300
|
4
|
8
|
13
|
17
|
21
|
25
|
|
400
|
3
|
6
|
8
|
11
|
14
|
17
|
Khi UVA bay ở độ cao thấp, cần phải xác định các yếu tố như:
- Xác định tuyến đường để thiết bị đi qua các điểm tham chiếu dễ nhận biết;
- Nghiên cứu và xác định các điểm mốc quan trọng dọc theo tuyến đường, đặc biệt là các dấu hiệu đặc trưng của các điểm mốc để người điều khiển có thể nhận ra mà không cần sử dụng bản đồ;
- Kiểm soát đường dẫn bằng việc thiết lập độ cao riêng. Nghiên cứu chi tiết địa hình dọc theo tuyến đường trong một dải rộng 25 km, chú ý đến vị trí và độ lớn của chướng ngại vật chính, hướng và vị trí tương đối của địa hình khu vực tìm kiếm;
- Khi xác định độ cao chuyến bay phải tính đến các điều kiện tầm quan sát ngang và dọc của các điểm mốc. Khi phát hiện đối tượng tìm kiếm, cần xác định và ghi lại: Thời điểm phát hiện; tọa độ của đối tượng; tình trạng của đối tượng.
Các phương pháp tìm kiếm trong thực tế
a. Tìm kiếm theo phương pháp sơ đồ hình lược
Hình 4. Sơ đồ tìm kiếm hình lược
Phương pháp này được sử dụng để tìm kiếm đối tượng trên một khu vực rộng lớn trong thời gian ngắn nhất nếu có đủ số lượng UVA tìm kiếm. Khi thực hiện nhiệm vụ sẽ tiến hành kiểm tra đồng thời toàn bộ khu vực tìm kiếm với một nhóm các UVA bay dọc theo các tuyến đường thẳng song song được xác định toạ độ trước.
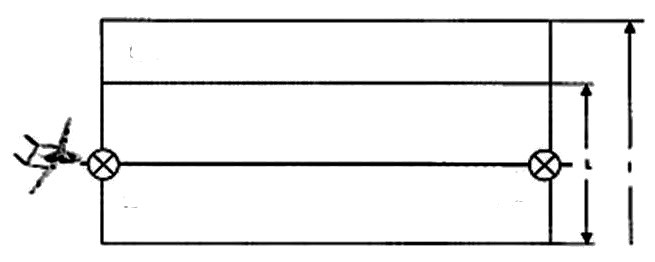
b. Tìm kiếm theo phương pháp định tuyến song song
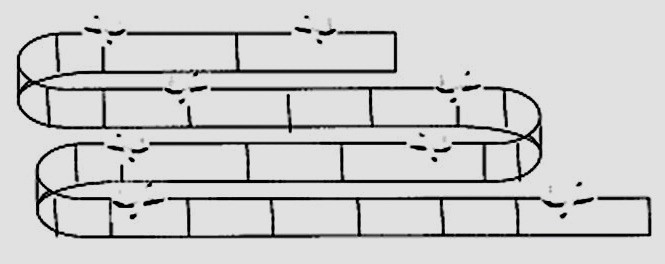
Hình 5. Sơ đồ tìm kiếm định tuyến song song
Phương pháp được sử dụng khi không có đủ số lượng UVA thực hiện hoạt động tìm kiếm trên một khu vực diện tích rộng. Với phương pháp này, khu vực tìm kiếm có thể được chia thành nhiều phần (theo các dải), được tìm kiếm đồng thời bởi một số UVA đơn lẻ hoặc tuần tự bởi một UVA. Việc tìm kiếm phải bắt đầu từ vị trí có xác suất tìm được cao nhất của đối tượng được tìm kiếm. Khi định hướng tuyến tìm kiếm, người điều khiển phải bảo đảm quan sát liên tục khu vực được chỉ định tìm kiếm với độ chồng lấn 25%, trong đó khoảng cách giữa các tuyến được duy trì: 1 km so với rừng; 0,5 km với rừng rậm; 2 km với địa hình bằng phẳng. Chiều dài tuyến tìm kiếm được khuyến cáo là từ 10-20 km.
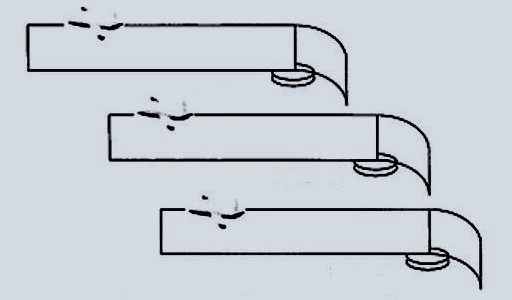
c. Tìm kiếm theo phương pháp mở rộng hình vuông
Hình 6. Sơ đồ tìm kiếm mở rộng hình vuông
Phương pháp này được sử dụng như một quy luật mở rộng khu vực tìm kiếm căn cứ theo dữ liệu chính xác có được về nơi xảy ra sự cố. Quá trình tìm kiếm chỉ cần sử dụng một UVA duy nhất, tìm kiếm xung quanh vị trí trọng tâm mà tại đó được xác định là vị trí của đối tượng tìm kiếm. Khoảng cách giữa các tuyến đường song song phải bảo đảm tầm nhìn liên tục trên địa hình.
d. Tìm kiếm theo phương pháp định tuyến có sẵn
Hình 7. Sơ đồ tìm kiếm định tuyến có sẵn
Phương pháp này được thực hiện theo chiều dọc của định tuyến đặt sẵn, UVA di chuyển dọc theo một phần của tuyến đường di chuyển đã biết (có thể) của đối tượng tìm kiếm. Phương pháp này được áp dụng hiệu quả khi khu vực tìm kiếm là một dải có chiều rộng bằng 0,5-0,7 lần phạm vi tìm kiếm của UVA.
Nguyễn Bá Tuấn, Nguyễn Văn Hải





 info@conda.com.vn/ 02363.797377
info@conda.com.vn/ 02363.797377














































































































































 Báo cháy Honeywell
Báo cháy Honeywell Hệ báo cháy địa chỉ
Hệ báo cháy địa chỉ